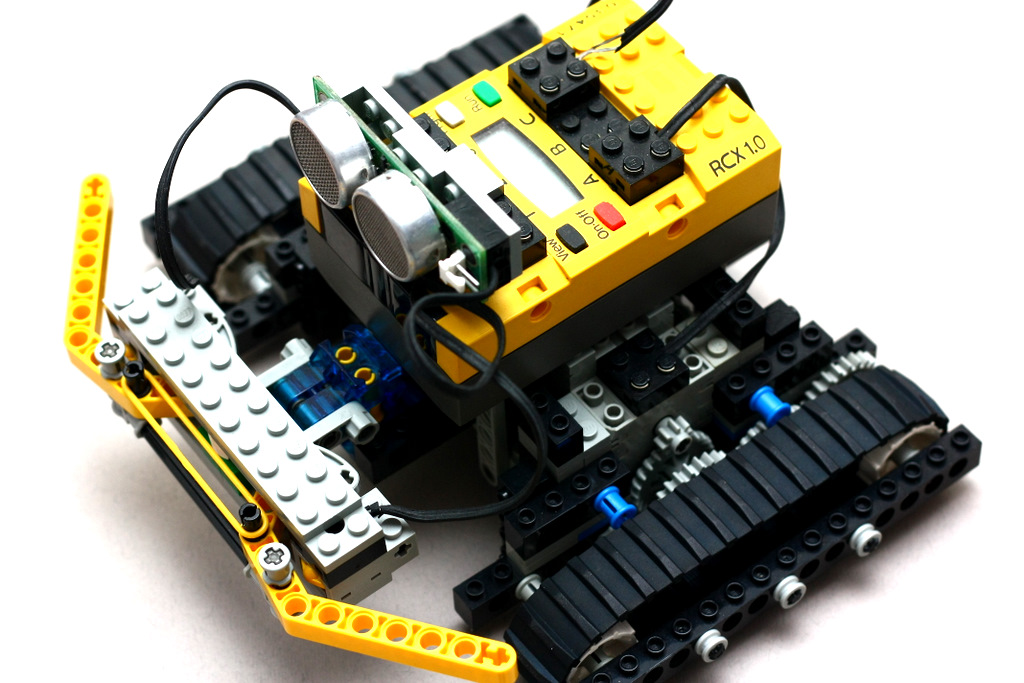
A quick Lego rover using the Mindstorms Robotic Invension System 1.5 using native RCX Code. The rover uses an Ultrasonic Proximity sensor coupled to the RCX brick. The Ultrasonic Proximity detector has a range of 30 cm to 2.5 meters. This sensor is capable of detecting distances of objects in front with accuracy of 2-3 cm.
The challenge was preventing the the rover crashing into walls. With the minimum sensor distance being 30 cms, detecting an approaching wall within 30 cms isn’t possible. The ultrasonic sensor is connected to the standard RCX input and configured as a light sensor in the RCX Code.
awesome